Using Attachments
Many of the sample project robots come with additional components that can be added. To see a listing of available attachments for the sample project robot, click on the Attachments  button located on the Toolbar. Attachments button in Simple Mode
button located on the Toolbar. Attachments button in Simple Mode 

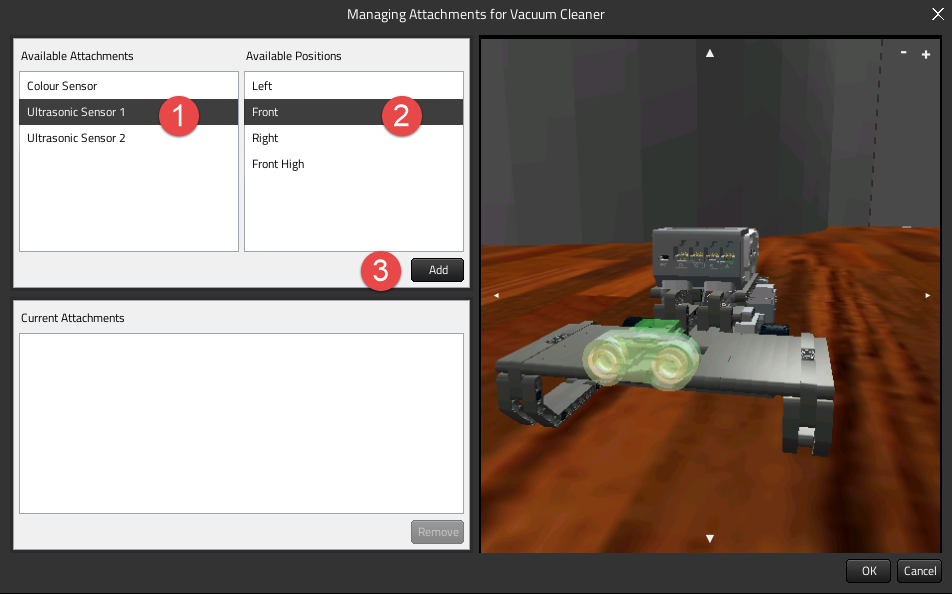 Adding an attachment Similarly, you can remove an existing attachment by selecting it from the "Current Attachments" list, and clicking on the "Remove" button.
Adding an attachment Similarly, you can remove an existing attachment by selecting it from the "Current Attachments" list, and clicking on the "Remove" button. 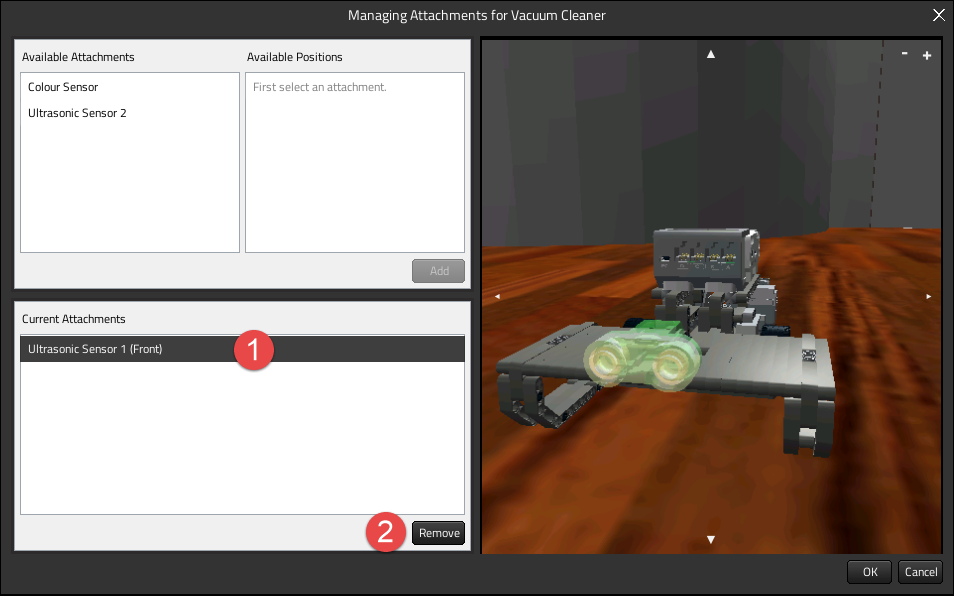 Removing an attachment When finished, click OK to save your changes. Powered by Froala Editor
Removing an attachment When finished, click OK to save your changes. Powered by Froala Editor
Installing LDD
The LEGO Digital Designer installation process is non disponibile. Just download the LDD v4.3.11 installer from this link:
https://cogmation.s3.amazonaws.com/downloads/setupLDD-PC-4_3_11.exe Then follow the instructions of the installation wizard, accept the license terms, click Next, configure the shortcuts, click Next again and continue to follow the prompts.
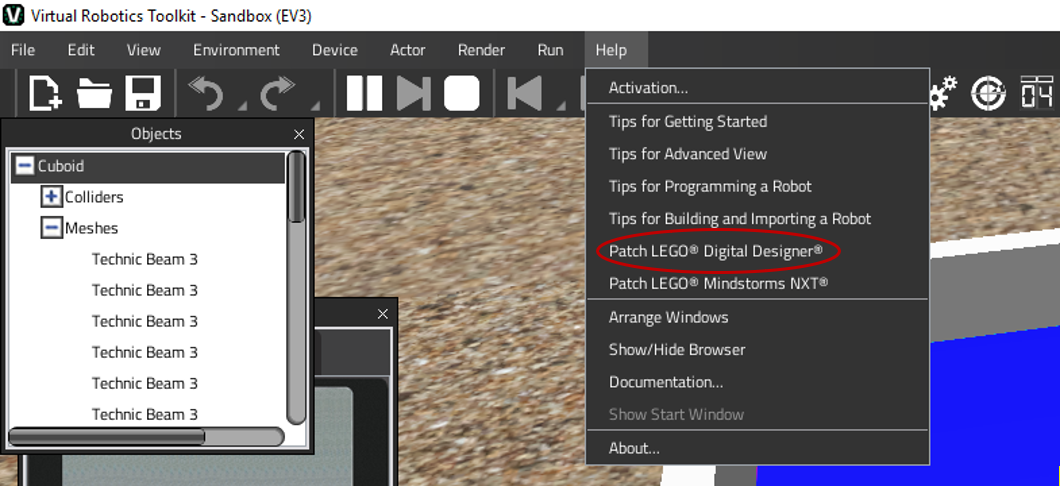
Make sure to patch LEGO Digital Designer in the Help menu in Advanced Mode. To learn more about how to enter Advanced Mode, click here.